ILeSiA: Interactive Learning of Robot Situational Awareness from Camera Input
Teaching robots how to use camera images to detect labeled and novel risks. ILeSiA is a framework that defines models regarding safety instruments used by robotic execution systems to evaluate safety metrics and potentially provide ways to recover from risky situations.

https://github.com/platonics-delft/ILeSiA
The Collaborative Robotics Workspace (CRoW)
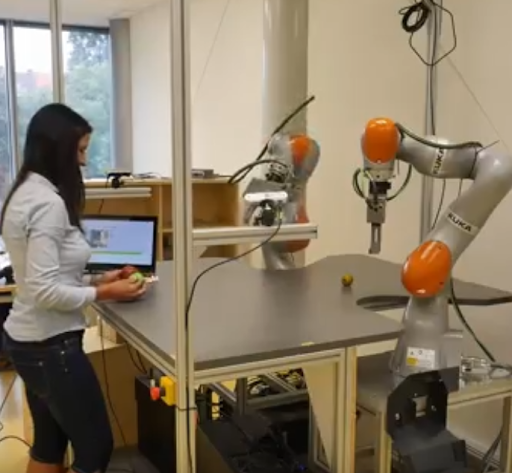
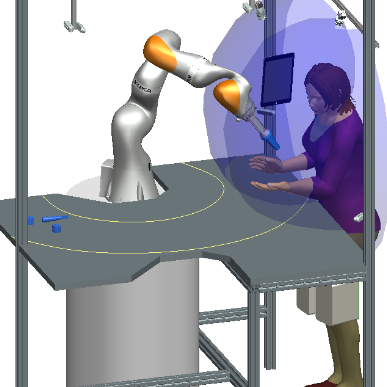
The Collaborative Robotics Workspace (CRoW) focuses on enhancing human-robot interactions within a shared workspace, allowing both to work collaboratively without the need for protective barriers. CRoW emphasizes scene awareness, enabling the robot to identify the human operator and objects within the workspace and to respond dynamically to operator needs, such as fetching specific tools. Key advancements include developing accurate scanning devices to reconstruct scene geometry, efficient bi-directional communication tools for natural language interactions, a robust data system for storing and predicting workspace states, and a workspace design that optimizes human-robot collaboration. Testing scenarios involve simple to complex command responses, action recognition, and task prediction, enabling the robot to anticipate and assist in future steps. These innovations strive to foster seamless, productive, and safe interactions between humans and robots in collaborative settings.
Collaborative Scheduling Task
Robot force/torque-compliant motion Demo
Adhesive tape application on planar surface
RadioRoSo – Project
Automated pallet jack
- Pallet jack has to supply pallets of bricks to brick laying robot.
- Two subtasks are solved in the project:
- automated pallet loading,
- automated pallet unloading to precise position relative to robot.


Direct Gesture Teleoperation of Robotic Manipulator demo
Hand tele-operation of the robotic manipulator arm with features for closing and opening the gripper.
Gesture robot control
Commanding the robotic manipulator with pseudo-gesture language. Pointing gesture to select object and grab gesture to grab given object.