2025


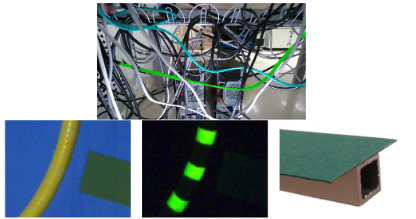
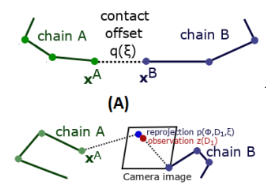
Interactive Robotic Moving Cable Segmentation by Motion Correlation
IEEE RA-L 2025
– Ondřej Holešovský, Radoslav Škoviera, Václav Hlaváč
2024
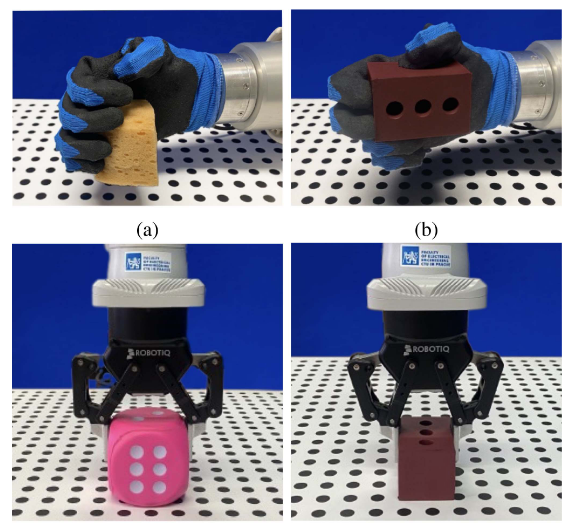
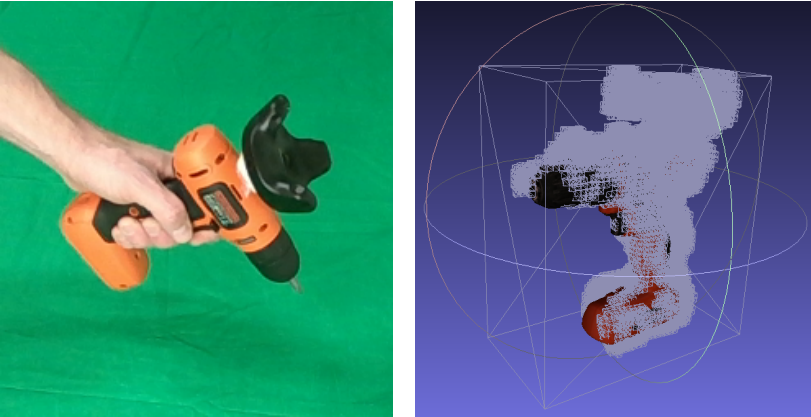
Single-Grasp Deformable Object Discrimination: The Effect of Gripper Morphology, Sensing Modalities, and Action Parameters IEEE T-RO 2024
– Michal Pliska, Shubhan Patni, Michal Mares, Pavel Stoudek, Zdenek Straka, Karla Stepanova, and Matej Hoffmann
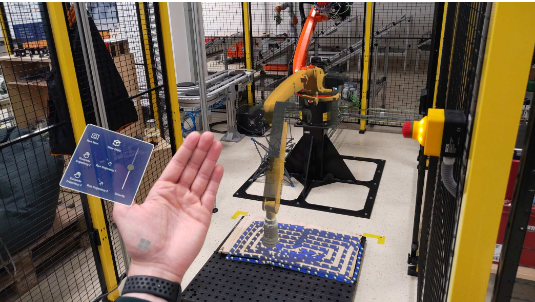
Integrating augmented reality within digital twins for smart robotic manufacturing systems ETFA 2024
– Tomáš Jochman, Václav Voltr, Václav Kubáček, Ondřej Švec, Pavel Burget, Václav Hlaváč
pdf 🗎

Bridging the Gap: Digital Twin Integration and Evaluation in Robotic Multi-Axis Additive Manufacturing INDIN 2024
– Tomáš Jochman, Václav Voltr, Václav Kubáček, Ondřej Švec, Pavel Burget, Václav Hlaváč
pdf 🗎
2023
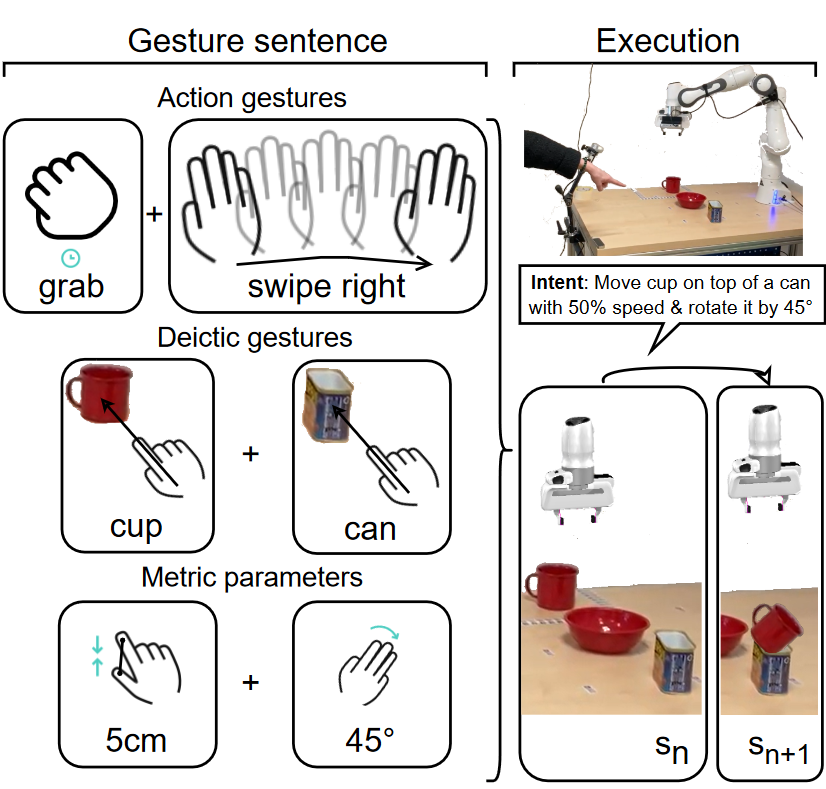
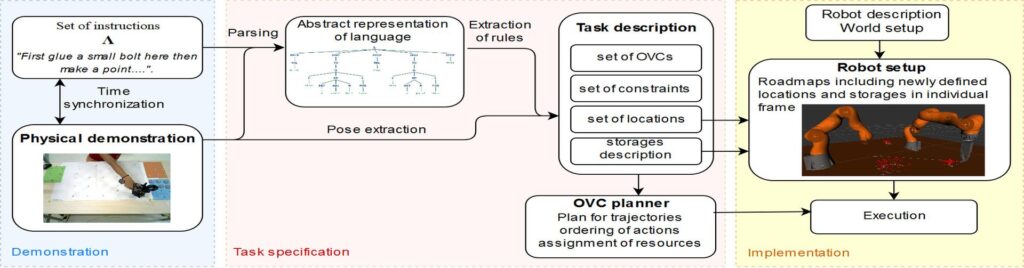
Communicating human intent to a robotic companion by multi-type gesture sentences IROS 2023
– P. Vanc, J. K. Behrens, K. Stepanova, V. Hlavac

2022
2021
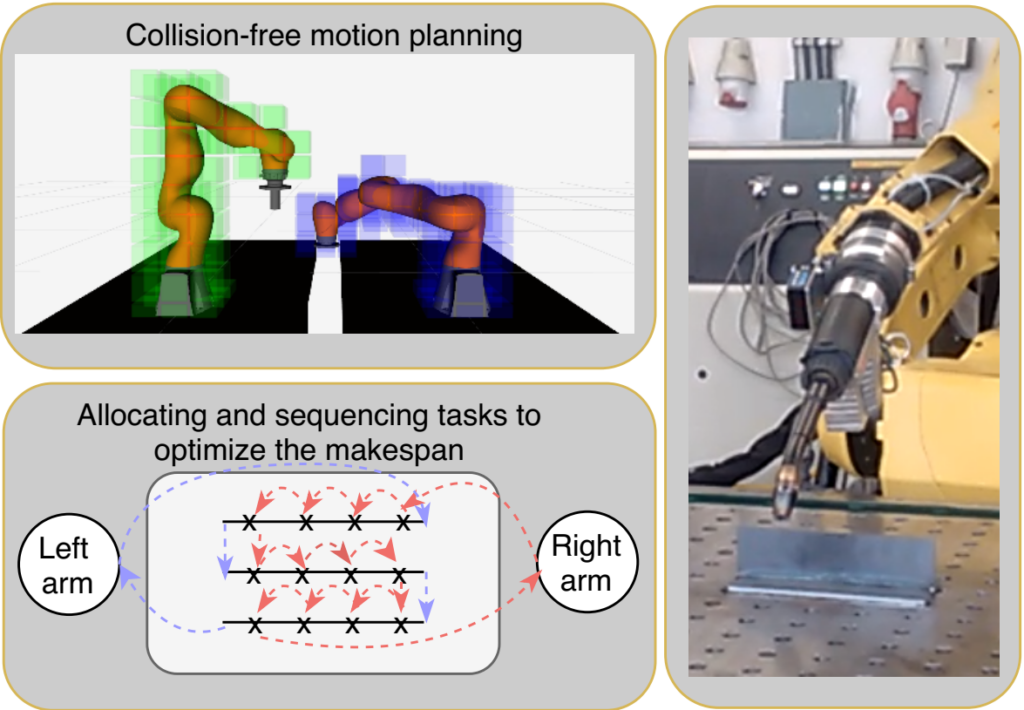
Embodied Reasoning for Discovering Object Properties via Manipulation ICRA 2021
– J.K.Behrens, M.Nazarczuk, K.Stepanova, M. Hoffmann, Y. Demiris, and K. Mikolajczyk
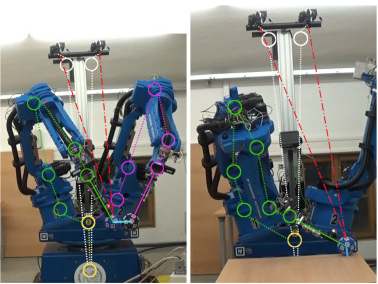
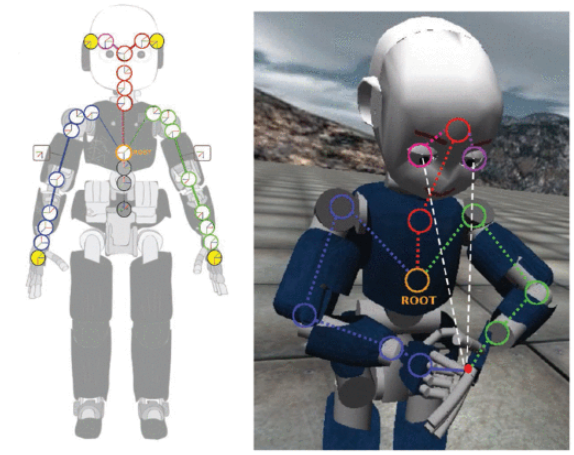
Multisensorial robot calibration framework and toolbox Humanoid Robots (https://drive.google.com/file/d/1iiIgpIlK2S5aXLhQlaLMu0ujcuXZ73gc/viewHumanoids), IEEE-RAS International Conference
– Rozlivek, J., Rustler, L., Stepanova, K., and Hoffmann, M.
2020
2019
2018

Mapping language to vision in a real-world robotic scenario. IEEE Transactions on Cognitive and Developmental Systems (2018)
– Štěpánová K., Frederico B. Klein, Angelo Cangelosi, and Vavrečka M.